落錘/擺錘式壓力校準系統
落錘/擺錘式壓力校準系統
1 功能簡介
1.1 塑性測壓元件(銅柱/銅球)準動態校準
基于落錘式壓力發生裝置可以實現銅球、銅柱等塑性測壓元件的準動態校準,準動態校準技術可有效地減小靜動差。所謂準動態校準,就是用已知峰值且波形與膛壓曲線接近的壓力脈沖作用于塑性敏感元件上,得出峰壓和敏感元件的輸出(銅柱是變形量,銅球是壓后高)間的對應關系,再據此編出動態壓力對照表。由于校準壓力源和待測壓力有相似的動態特征,可以有效減小塑性測壓器件的靜動差。
1.2 各類壓力傳感器的老化處理
準靜態校準裝置依靠PLC控制系統,準靜態校準裝置可以自動產生幅值不同的準靜態壓力載荷。通過向傳感器不斷施加準靜態壓力載荷,可以輕松實現傳感器老化過程的自動化進行。
1.3 壓電式傳感系統準靜態校準
校準裝置依靠準靜態壓力發生裝置準產生2-8ms脈寬的近半正弦信號作為激勵信號,可解決壓電式壓力傳感器靜態及低頻特性不佳而不適用于靜態校準的問題,適用于壓電式壓力傳感器的校準。針對不同量程的壓力傳感器可以選用擺錘/落錘產生激勵信號,可以保證激勵信號有足夠的壓力分辨率。擺錘式準靜態校準系統適用于小量程(0-10MPa)傳感器的校準,而落錘式準靜態校準裝置適用于大量程(0-1000MPa)傳感器的校準。
1.4 壓力傳感系統的溫度特性參數獲取
校準裝置配備校準溫度控制裝置,通過將造壓油缸組件放置在保溫箱中,可以對被校傳感器所處環境的溫度進行控制。依靠溫度特性優秀的壓力傳感器組成標準壓力監測系統,可在不同的環境下對傳感器進行校準,從而獲取傳感器的靈敏度、線性度等工作特性參數隨溫度的變化。
2 系統構成
2.1 校準系統的組成
校準系統主要由造壓油缸、高低溫控制系統、落錘式準靜態壓力發生裝置、擺錘式準靜態壓力發生裝置組成。
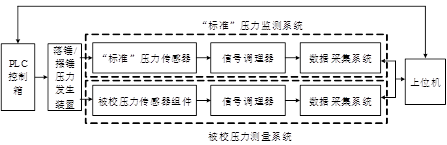
圖1 準靜態校準系統原理框圖
1. 造壓油缸
造壓油缸是產生激勵壓力的關鍵部件,其結構如圖 2所示。造壓油缸主要包括:油缸本體、精密活塞缸、精密活塞桿、溢流閥等。通過調整系統的參數,如擺錘質量、活塞桿工作面積以及造壓油缸的初始容積等可以獲得不同脈寬和幅值的半正弦壓力信號。
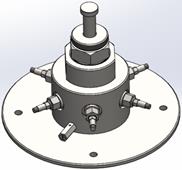
圖 2 造壓油缸外形示意圖
落錘/擺錘式壓力發生裝置通過錘頭錘擊活塞桿壓縮油缸內部的造壓油從而實現傳感器的校準。油缸本體上設計有多個標準壓力傳感器安裝孔及被校傳感器安裝孔,被標傳感器通過專門設計的轉接件安裝到造壓油缸上,轉接件可用于各類壓力傳感器的連接。
2. 落錘式壓力發生裝置
落錘裝置主要由以下幾部分組成:校準裝置框架、造壓油缸、重錘組件、提錘組件、托錘組件和防爆機柜等,如圖 3所示。改變重錘質量、重錘高度、造壓油缸的初始容積及活塞工作面積,可產生用于傳感器標定用的各種峰值和脈寬的激勵壓力信號。

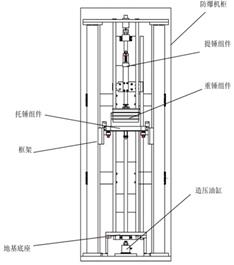
a)落錘裝置實物圖 b)落錘裝置總體結構示意圖
圖 3落錘裝置總體機械結構
落錘式準靜態校準裝置采用重錘錘擊造壓油缸活塞桿纏身激勵壓力。重錘主要由基本錘架和配重盤片構成,通過添加不同質量的配重盤片實現不同的質量要求。重錘結構如圖 4所示,主要由基本錘架、錘頭、過渡件、配重盤片組合、吸盤扇形導套等構成。

圖 4 重錘組件結構
提錘組件主要包括直線定位組件和提錘臂(含電磁起重器),直線定位組件由PLC發出工作指令驅動步進電機帶動滾珠絲杠,從而定位掛錘系統及重錘高度。
校零器的主要功能在于確定光柵尺位移行程的零點,以精確定位重錘與活塞工作面之間的高度。每次安裝造壓油缸后,需在重錘外側套上校零器,控制重錘緩慢下落直至校零器觸碰到活塞桿表面產生接觸信號,此時信號被反饋至PLC端,將此刻重錘位置記做光柵尺的相對零位,并在PLC內置程序內將下落高度置為校零器的高度。在此之后重錘上升至安全高度,系統進入試驗的待機狀態。
托錘系統連接板分別與兩側的無桿氣缸活塞(滑臺)連接,由連接架連為一體,保證兩側氣缸同步運動。托錘組件的主要作用是將重錘提升到電磁起重器可以吸錘的位置和防止二次擊錘。當落錘下落擊中活塞組件后,通過安裝在框架上的重錘感應開關控制氣動托錘板快速上升。
落錘液壓校準裝置采用PLC全自動控制,并配備觸摸屏進行操作。控制系統與校準裝置本體之間通過專用線纜連接,并預留與上位機的通信接口。控制系統具有提升高度輸入、提升高度實時顯示、壓力和脈寬估算等一系列功能。控制系統的組成如圖 5所示,其主要PLC、觸摸屏、位置監測傳感器和各控制及執行元件。
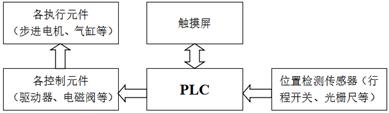
圖 5 控制系統的組成框圖
3. 擺錘式準靜態校準裝置
擺錘式準靜態校準裝置主要依靠擺錘錘頭錘擊造壓油缸活塞桿產生半正弦壓力信號。校準裝置主要由驅動模塊(步進電機組)、執行模塊(擺錘-油缸機構)及PLC控制系統三大部分構成。擺錘裝置產生的壓力幅值為0~10MPa,壓力脈寬為2~8ms,適用于小量程壓力傳感器的準靜態校準。校準裝置所具有的基本功能主要包括:精確提升擺錘、固定擺錘、擺錘自由下落以及防二次撞擊等。
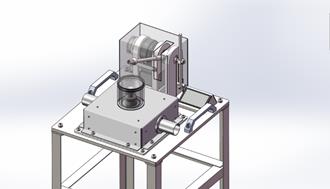
圖 6 擺錘式壓力發生器
校準裝置能夠通過PLC控制步進電機提升擺錘到指定位置。依靠相應的傳感器可以測出擺錘的提升角度,并反饋至PLC模塊,從而精確控制擺錘的提升高度。在擺錘自由下落時,斷開擺桿和驅動單元物理連接,應盡可能地減少擺錘的下落阻力,盡滿足擺錘和活塞的撞擊速度要求。校準裝置具有相應的防止二次撞擊的裝置,可避免反彈后的擺錘再次撞擊活塞。
擺錘式壓力發生器采用PLC全自動控制,并配備觸摸屏進行操作。控制系統與校準裝置本體之間通過專用線纜連接,并預留與上位機的通信接口。控制系統具有擺錘提升角度輸入、提升角度實時顯示等一系列功能。擺錘裝置控制系統主要包含控制箱組成,控制箱由HMI觸摸屏、PLC可編程控制器、繼電器、開關電源以及步進電機,其具體組成如圖 7所示。
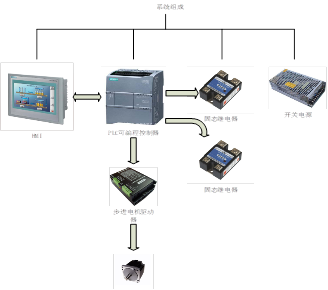
圖 7 擺錘裝置控制系統組成
2.2 壓力監測系統
1. 壓力監測系統組成
擺錘式標準壓力傳感器針對常用量程的沖擊波壓力傳感器(50psi(0.345MPa)、100psi(0.69MPa)、200psi(1.38MPa)、500psi(3.45MPa)、1000psi(6.9MPa)),沖擊波壓力校準系統選用Kistler公司量程為25MPa的601CAA壓電式壓力傳感器。601CAA壓電式壓力傳感器如圖4.1所示,其主要技術指標如表4.1所列。

圖 8 601CAA壓力傳感器實物圖
表1 601CAA傳感器技術參數
|
型號 |
601CAA |
|
量程 |
25MPa |
|
過載 |
30MPa |
|
線性度與遲滯 |
≤±0.1%FSO |
|
工作溫度 |
-196~350℃ |
|
固有頻率 |
>215kHz |
為了提高0~1MPa低量程段的壓力監測精度,本項目擬采取以下措施:
1)在0~1MPa壓力范圍內單獨進行量值傳遞,采用多輪循環校準的方法,建立標準壓力監測系統在低量程段內的工作方程;
2)通過增大電荷放大器的放大倍數,提高標準傳感器601CAA的壓力分辨率;
3)借助于電荷校正器對電荷放大器進行校正,以減小調理器的電荷漂移。
除了在10~25MPa時選用601CAA壓力傳感器,落錘式標準壓力傳感器選用Kistler公司的1000MPa的6213BK型壓力傳感器用作壓力量程段25~700MPa的準靜態校準。6213BK壓力傳感器如圖4.2所示,其主要技術指標如表4.2所列。

圖 9 壓力傳感器實物圖
表2 6213BK壓力傳感器技術參數
|
型號 |
6213BK |
|
量程 |
1000MPa |
|
過載 |
1100MPa |
|
線性度 |
≤±0.3%FSO |
|
工作溫度 |
-50~200℃ |
|
固有頻率 |
>150kHz |
壓力傳感器適配的是Kistler公司5018A電荷放大器,該型號電荷放大器實物如圖4.3所示,其主要技術指標如表4.3所列。

圖 10 5018A型電荷放大器實物圖
表3 5018A型電荷放大器技術參數
|
型號 |
5018A |
|
測量范圍 |
±2~2200000pC |
|
測量誤差 |
<0.3% |
|
工作帶寬 |
0~200kHz |
|
最大輸出電壓 |
±10V |
2. 不確定度分析
1)傳感器引入的不確定度分析
采用kistler公司的601CAA和6213BK傳感器作為標準傳感器,由601CAA傳感器說明書可得傳感器的線性度、重復性、遲滯分別為 ,
, ,
, ,其中線性度、重復性、遲滯性按均勻分布計算,則601CAA引入的不確定度為
,其中線性度、重復性、遲滯性按均勻分布計算,則601CAA引入的不確定度為 。由6213BK傳感器說明書可得傳感器的線性度、重復性、遲滯分別為
。由6213BK傳感器說明書可得傳感器的線性度、重復性、遲滯分別為 ,
, ,
, ,因此6213BK傳感器引入的不確定度為
,因此6213BK傳感器引入的不確定度為 。
。
2)標準壓力監測系統不確定度分析
除了傳感器本身引入的不確定度外,系統的不確定度還由以下分量組成。調理器的增益誤差及漂移誤差引起的不確定度可記為 、
、 ,有:
,有:
 (4.1)
(4.1)
式中、 可采用B類不確定度進行計算,按均勻分布的形式計算,可從相應說明書中找到對應增益誤差 及漂移誤差
及漂移誤差 ,則有
,則有

 (4.2)
(4.2)
數據采集系統線性、增益及量化引起的不確定度為:
 (4.3)
(4.3)
壓力基準源不確定度 取實際采用的活塞式壓力機的不確定度,由計量部門提供的校準證書可得擴展不確定度為0.02%(k=3),則
取實際采用的活塞式壓力機的不確定度,由計量部門提供的校準證書可得擴展不確定度為0.02%(k=3),則
 (4.4)
(4.4)
根據以往的經驗數據電測系統實際工況及環境引起的電噪聲有 。據相關資料給定的造壓油缸壓力不一致性
。據相關資料給定的造壓油缸壓力不一致性 可取0.2%綜上,由單通道引入的標準壓力監測系統壓力監測不確定度為
可取0.2%綜上,由單通道引入的標準壓力監測系統壓力監測不確定度為
 (4.5)
(4.5)
兩路壓力測量系統構成標準壓力監測系統的標準不確定度為
 (4.6)
(4.6)
其擴展不確定度U(k=2)為
 (4.7)
(4.7)
四路壓力測量系統構成標準壓力監測系統的標準不確定度為
 (4.6)
(4.6)
其擴展不確定度U(k=2)為
 (4.7)
(4.7)
2.3 量傳途徑
量值傳遞是測量系統校準的基礎,測量結果具有“溯源性”,是量值傳遞準確一致的前提。校準系統采用的直接比對式校準方法傳遞路線較短,精度較高。依照國家計量等級鏈逐級進行量值傳遞,保證被測對象的量值準確和統一。具體量傳途徑如圖所示。
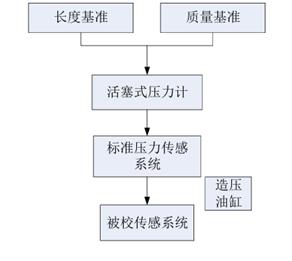
圖 11量傳途徑圖
準靜態校準的量值傳遞分為三步:首先,通過質量和長度基準傳遞到活塞式壓力計;其次,經過靜態標定,由活塞式壓力計將標準壓力傳遞至標準壓力傳感系統;最后,經過準靜態校準,經造壓油缸由標準壓力監測系統傳遞至被校壓力傳感系統。
3 落錘/擺錘式準靜態校準系統
3.1 主要技術指標
l 壓力校準范圍:擺錘式準靜態校準裝置:0-10MPa
落錘式準靜態校準裝置0-1000MPa;
l 壓力波形:近似半正弦形
l 溫度控制范圍:-40-135℃
l 準靜態壓力脈寬:2-8ms(可調)
l 監測系統監測不確定度。
|
|
0-25MPa |
0-1000MPa |
|
雙標準傳感器 |
1.50% |
1.53% |
|
四標準傳感器 |
1.06% |
1.08% |
3.2 主要功能及控制方式
1. 準靜態/準動態校準功能
準靜態/準動態校準采用PLC控制落錘/擺錘校準裝置進行。校準過程可通過控制面板控制校準過程中提錘高度等相關參數。校準數據依靠采集系統傳輸給上位機。通過數據處理軟件可計算得出被校傳感器的靈敏度、線性度等工作特性參數并生成實驗報告。除此之外,軟件還可以根據實際需求進行界面及功能上的定制。
2. 傳感器老化功能
傳感器老化過程通過PLC控制器控制落錘/擺錘準靜態壓力發生裝置不斷向傳感器施加不同幅值的壓力載荷實現,老化過程可以在控制裝置的控制下自動進行。老化時間施加壓力等相關參數可以通過控制面板進行設計。
3. 壓力傳感系統高低溫校準功能
該功能由準靜態校準系統與高低溫環境控制系統配合實現。通過高低溫度控制箱可以控制壓縮機或加熱器將造壓油缸的保溫箱溫度控制到設定值。在保溫指定時間后,采用準靜態校準系統可以對處于指定環境溫度的傳感器進行校準,進而獲得不同溫度下的傳感器工作特性參數。
4 典型應用例
4.1 數據處理方法
由于擺錘及落錘的狀態控制的原因,很難保證設定同樣的擺角及落高每次可以打出同樣的壓力峰值。導致擺錘裝置在多次校準中難以準確實現某個特定壓力值,采用靜態特性求取方法并不適用于準靜態校準。為給出準靜態校準被校傳感系統的工作特性參數(包括靈敏度、非線性度以及重復性)求取準則,開展準靜態校準數據處理方法研究。假設第i輪第j個標定點的“標準”壓力為 ,對應被校系統的 輸出電壓為
,對應被校系統的 輸出電壓為 ,i=1~m,m為輪數,j=1~n,n為標定點數。按最小二乘原則對第i輪校準數據線性擬合可得該輪的參考特性方程為:
,i=1~m,m為輪數,j=1~n,n為標定點數。按最小二乘原則對第i輪校準數據線性擬合可得該輪的參考特性方程為:
|
|
|
(1) |

式中, 為標準壓力,
為標準壓力, 為對應的輸出電壓,
為對應的輸出電壓, 為第i輪工作曲線的偏置,
為第i輪工作曲線的偏置, 為第i輪工作曲線的斜率。在傳感器量程范圍內由大到小均勻地取n個理想“標準”壓力點
為第i輪工作曲線的斜率。在傳感器量程范圍內由大到小均勻地取n個理想“標準”壓力點 (k=1,2,…,n),將代入第i輪參考特性方程,得對應的預測電壓值
(k=1,2,…,n),將代入第i輪參考特性方程,得對應的預測電壓值 。將m輪的預測電壓值做算術平均,可得預測電壓平均值為
。將m輪的預測電壓值做算術平均,可得預測電壓平均值為 ,對n組()最小二乘擬合,得被校系統的工作特性方程為:
,對n組()最小二乘擬合,得被校系統的工作特性方程為:
|
|
|
(2) |

(a) 靈敏度
由工作特性方程可知,式中b為被校系統的偏置,單位為V;s為被校系統的靈敏度,單位為V/MPa。
(b) 非線性
非線性是系統的實際輸入輸出特性曲線對于理想線性輸入輸出特性的接近或偏離程度,非線性 按式(3)計算:
按式(3)計算:
|
|
|
(3) |
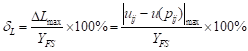
式中, 為殘差最大值,
為殘差最大值, 為被校系統滿量程輸出,
為被校系統滿量程輸出, 是將第i輪第j個標定點的標準壓力代入工作特性方程(2)得到的預測電壓值。
是將第i輪第j個標定點的標準壓力代入工作特性方程(2)得到的預測電壓值。
(c) 重復性
重復性是指標定值的分散性,是一種隨機誤差,可根據標準偏差來計算重復性,重復性 按式(4)計算:
按式(4)計算:
|
|
|
(4) |
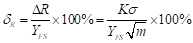
式中 為標準偏差,K為置信因子,各標定點的標準偏差可用貝塞爾公式計算:
為標準偏差,K為置信因子,各標定點的標準偏差可用貝塞爾公式計算:
|
|
|
(5) |

式中, 為第i輪的剩余標準偏差,描述了該輪被校系統的電壓輸出相對于該輪參考特性方程的偏離程度:
為第i輪的剩余標準偏差,描述了該輪被校系統的電壓輸出相對于該輪參考特性方程的偏離程度:
|
|
|
(6) |
式中,q為回歸方程的待定參數個數,此處q=2。
標準偏差為:
|
|
|
(7) |

4.2 校準應用例
以200psi量程的IEPE反射壓傳感器為例,進行準靜態校準試驗,5輪校準結果如表4所列。
表4 傳感器的校準結果
|
輪次 |
測量 系統 |
標定點1 |
標定點2 |
標定點3 |
標定點4 |
標定點5 |
標定點6 |
標定點7 |
標定點8 |
標定點9 |
標定點10 |
|
1 |
標準壓力/MPa |
0.096 |
0.203 |
0.312 |
0.418 |
0.503 |
0.585 |
0.721 |
0.834 |
0.918 |
1.034 |
|
被較電壓/V |
0.418 |
0.851 |
1.297 |
1.710 |
2.075 |
2.436 |
2.962 |
3.428 |
3.764 |
4.224 |
|
|
2 |
標準壓力/MPa |
1.016 |
0.913 |
0.788 |
0.702 |
0.575 |
0.487 |
0.407 |
0.292 |
0.215 |
0.089 |
|
被較電壓/V |
4.128 |
3.725 |
3.235 |
2.874 |
2.371 |
2.006 |
1.678 |
1.219 |
0.904 |
0.400 |
|
|
3 |
標準壓力/MPa |
0.112 |
0.208 |
0.292 |
0.381 |
0.507 |
0.595 |
0.708 |
0.800 |
0.889 |
1.051 |
|
被較電壓/V |
0.473 |
0.840 |
1.208 |
1.574 |
2.080 |
2.481 |
2.898 |
3.254 |
3.634 |
4.285 |
|
|
4 |
標準壓力/MPa |
1.043 |
0.921 |
0.814 |
0.697 |
0.587 |
0.488 |
0.413 |
0.305 |
0.200 |
0.101 |
|
被較電壓/V |
4.248 |
3.765 |
3.332 |
2.859 |
2.437 |
2.014 |
1.707 |
1.274 |
0.838 |
0.449 |
|
|
5 |
標準壓力/MPa |
0.098 |
0.200 |
0.305 |
0.403 |
0.490 |
0.590 |
0.708 |
0.808 |
0.904 |
0.994 |
|
被較電壓/V |
0.452 |
0.832 |
1.286 |
1.710 |
2.031 |
2.433 |
2.909 |
3.321 |
3.698 |
4.045 |
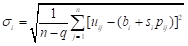
第1輪最低壓力點和最高壓力點的校準波形如圖12所示。
|
|
|
|
(a) 最低壓力點 |
(b) 最高壓力點 |
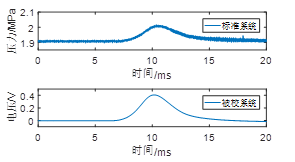
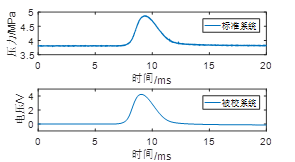
圖12 第1輪典型校準曲線
對每輪數據進行最小二乘線性回歸,得每輪參考特性方程如圖13及表5所示。
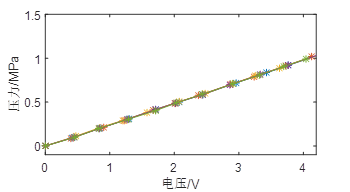
圖13 沖擊波壓力傳感器5輪參考特性曲線
表5 每輪參考特性方程、相關系數及剩余標準偏差
|
輪數 |
參考特性曲線 |
相關系數 |
剩余標準偏差/V |
|
1 |
|
1.000 |
0.013 |
|
2 |
|
1.000 |
0.008 |
|
3 |
|
1.000 |
0.019 |
|
4 |
|
1.000 |
0.010 |
|
5 |
|
1.000 |
0.016 |





按靈敏度計算方法,代入表4、表5數據,可得傳感器的工作特性方程為: 。靈敏度為4.050V/MPa。非線性按式(3)計算為0.83%,重復性按式(4)計算為0.59%,取k=2。
。靈敏度為4.050V/MPa。非線性按式(3)計算為0.83%,重復性按式(4)計算為0.59%,取k=2。
 蘇公網安備32010402000796號
蘇公網安備32010402000796號

